本篇目录:
- 1、工业机器人是如何更好地实现它的运动控制?
- 2、简述工业机器人在手动操作下的三种动作模式及特点?
- 3、工业机器人控制系统的基本原理是什么
- 4、简述工业机器人的控制方式有哪些?
- 5、工业机器人力控制如何控制
- 6、工业机器人的构造及工作原理是什么?
工业机器人是如何更好地实现它的运动控制?
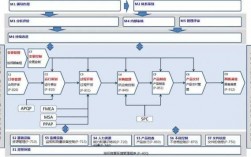
1、工业机器人的运动控制主要是实现 点位运动( PTP ) 和 连续路径运动(C P ) 两种。
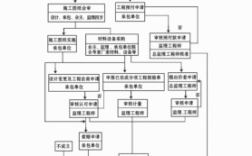
2、点位控制方式(PTP)这种控制方式只对工业机器人末端执行器在作业空间中某些规定的离散点上的位姿进行控制。在控制时,只要求工业机器人能够快速、准确地在相邻各点之间运动,对达到目标点的运动轨迹则不作任何规定。
-图1")
3、机器人机械手位置检测设备:位置检测装置主要由传感器组成,控制系统可以通过传感器反馈的信息实现机械臂各自由度的运动模式,从而形成稳定的闭环控制。
4、机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
5、点位控制方式(PTP)这种控制方式只对工业机器人末端执行器在作业空间中某些规定的离散点上的位置进行控制。在控制时,只要求工业机器人能够快速、准确地在相邻各点之间运动,对达到目标点的运动轨迹则不作任何规定。
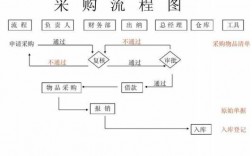
6、- 可靠性好:在重现模式下,机器人的运动是确定性的,可以保证稳定和可靠的执行。 遥控模式(Teleoperation Mode):遥控模式下,操作人员通过远程设备(如遥控器或者控制台)操纵机器人。
-图2")
简述工业机器人在手动操作下的三种动作模式及特点?
机器人三种动作模式分别是:示教模式、再现模式、远程模式。示教模式:对所有工作点进行示教操作;再现模式:对示教任务进行再现操作;远程模式:对机器人进行远程操作。
根据查询相关公开信息ABB工业机器人的手动操作手动操纵机器人运动一共有三种模式:单轴运动、线性运动和重定位运动。
库卡工业机器人手动操作模式有3个,分别是轴运动,线性运动与重定位运动三种。库卡(KUKA)机器人示教器的基本操作。(一)手动操作更改模式为:1,点击左上角abb图标。2,手动操纵。3,动作模式。4,选中某个轴。
建议你最好使用轴坐标模式进行校正及点位的校正,保存点位的时候把它保存为笛卡尔坐标系的格式即可。
-图3")
特点是能直观的感受就是运行速度的快慢。机器人手动运行模式下的增量模式下,手动操纵机器人进行线性、重定位、轴运动时,机器人的单位运动量,可以直观的感受就是运行速度的快慢。
工业机器人控制系统的基本原理是什么
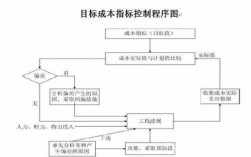
工业机器人的技术原理:机器人控制系统是机器人的大脑,是决定机器人功能和性能的主要因素。工业机器人控制技术的主要任务就是控制工业机器人在工作空间中的运动位置、姿态和轨迹、操作顺序及动作的时间等。
工业机器人结构原理工业机器人通常由三个主要部分组成:机械结构、控制系统和感测器。机械结构由若干关节和臂构成,可以在三维空间中移动。控制系统负责控制机器人的运动,通常包括一个计算机控制器和驱动器。
这么跟你说吧,机器人控制系统是机器人的大脑,是决定机器人功能和性能的主要因素。工业机器人控制技术的主要任务就是控制工业机器人在工作空间中的运动位置、姿态和轨迹、操作顺序及动作的时间等。
工业机器人是一种生产装备,其基本功能是提供 作业所须的运动和动力.其基本工作原理是通过操作机 上各运动构件的运动.自动地实现手部作业的动作功能 及技术要求。
学习工业机器人需要掌握以下知识: 机器人技术:了解机器人的基本原理、结构和工作方式,包括传感器、执行器、控制系统等组成部分。
工业机器人技术主要学内容如下:机器人结构和工作原理:学习机器人的结构、运动学、动力学、控制系统等基本原理。机器人编程:学习机器人编程语言、编程方法、程序设计等技术,能够编写机器人控制程序。
简述工业机器人的控制方式有哪些?
连续轨迹控制方式(CP)这种控制方式是对工业机器人末端执行器在作业空间中的位置进行连续的控制,要求其严格按照预定的轨迹和速度在一定的精度范围内运动,而且速度可控,轨迹光滑,运动平稳,以完成作业任务。
)点位式 许多工业机器人要求能准确地控制末端执行器的工作位置,而路径却无关紧要.例如,在印刷电路板上安插元件、点焊、装配等工作,都属于点位式控制方式。一般来说,点位式控制比较简单,但精度不是很理想。
点对点控制(PTP)通过控制工业机器人末端执行器在工作空间内某些指定离散点的位置和姿态。能够从一个点移动到另一个点。这些位置都将记录在控制存储设备中。PTP 机器人不控制从一个点到下一个点的路径。
你的问题比较笼统,如果从操作者的角度讲现在机器人有示教控制和离线编程控制两类,如果从机器人运动控制的角度讲,控制方式主要分为点位控制(即点到点控制,PTP)和连续轨迹控制(LP)。
工业机器人在手动操作下通常有三种动作模式,它们是: 示教模式(Teach Mode):示教模式是最常见的手动操作方式。在示教模式下,操作人员通过手柄、操纵杆或者特定的示教装置来直接控制机器人的动作。
工业机器人力控制如何控制
1、点位控制方式(PTP)这种控制方式只对工业机器人末端执行器在作业空间中某些规定的离散点上的位姿进行控制。在控制时,只要求工业机器人能够快速、准确地在相邻各点之间运动,对达到目标点的运动轨迹则不作任何规定。
2、)点位式 许多工业机器人要求能准确地控制末端执行器的工作位置,而路径却无关紧要.例如,在印刷电路板上安插元件、点焊、装配等工作,都属于点位式控制方式。一般来说,点位式控制比较简单,但精度不是很理想。
3、机器人控制理论:控制方法千奇百怪,这里仅举机器人臂的两个比较经典而常用的方法:混合力位控制和阻抗控制。
工业机器人的构造及工作原理是什么?
1、机械本体,是机器人赖以完成作业任务的执行机构,一般是一台机械手,也称操作器、或操作手,可以在确定的环境中执行控制系统指定的操作。典型工业机器人的机械本体一般由手部(末端执行器)、腕部、臂部、腰部和基座构成。
2、工业机器人是现代制造非常常用的自动化核心机械,常用也叫做机械手臂,工业机械手,机械臂,机器人手臂,机械人手等等。
3、按照各驱动特点以及机器人的工作环境采用电气动驱动。其他还有采用混合驱动,即液-气或电-液混合驱动。工业机器人开始采用无减速机构的大转矩、低转速电机进行直接驱动这既可使机构简化,又可提高控制精度。
4、工业机器人结构原理工业机器人通常由三个主要部分组成:机械结构、控制系统和感测器。机械结构由若干关节和臂构成,可以在三维空间中移动。控制系统负责控制机器人的运动,通常包括一个计算机控制器和驱动器。
5、驱动系统可以是液压传动、气压传动、电动传动、或者把它们结合起来应用综合系统,可以是直接驱动或者通过同步带、链条、轮系、谐波齿轮等机械传动进行间接传动。
到此,以上就是小编对于工业机器人的控制过程的问题就介绍到这了,希望介绍的几点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏