本篇目录:
卡尔曼滤波作业,方程怎么建立啊?求助!
卡尔曼滤波的算法可以分为两个主要步骤:预测和校正。
卡尔曼滤波(Kalman filtering)一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。由于观测数据中包括系统中的噪声和干扰的影响,所以最优估计也可看作是滤波过程。
-图1")
但对于卡尔曼滤波器的详细证明,这里不能一一描述。首先,我们先要引入一个离散控制过程的系统。
卡尔曼滤波是一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。由于观测数据中包括系统中的噪声和干扰的影响,所以最优估计也可看作是滤波过程。
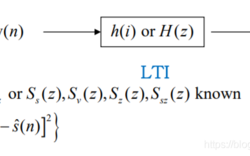
什么是预白化方法
是。预白化是一种数据处理方法,旨在减少数据集中的噪声和冗余信息,以提高模型的性能和结果的可靠性,可以通过去除数据中的非相关特征或通过降维技术来实现。
白化处理主要是为了避免在传输过程中出现过长的连续0或1的位流模式。基带处理器需要从接收到的模拟数据信号中判断数据是0还是1,但过长的连续0或1位流会造成问题。
-图2")
基本释义pre-whitening 预美白 双语例句 The subject came up during a pre-dinner drink with our guests.在与客人喝餐前酒的时候,有人提到了这个话题。
kalman滤波中的Q和R如何求得?
其中,K(k)表示卡尔曼增益,R(k)表示观测噪声协方差矩阵,x(k|k)表示时刻k的状态估计值。然后,计算状态估计误差的协方差矩阵:P(k|k) = (I - K(k) H) P(k|k-1)其中,I表示单位矩阵。
但对于卡尔曼滤波器的详细证明,这里不能一一描述。首先,我们先要引入一个离散控制过程的系统。
也就是说目标的运动方程实际上是X=AX+Bu+q,q代表噪声,在卡尔曼滤波中q服从高斯分布。
-图3")
使得机器人在路线规划和避障方面更加精准。 工程控制 卡尔曼滤波也可用于各种自动化工程控制系统中。通过对一个控制系统的状态进行实时估算,卡尔曼滤波可以检测系统偏差,从而帮助优化系统控制性能。
首先打开手机,进入手机主界面。其次进入手机主界面后,打开浏览器,输入卡尔曼滤波中的pqr初始化的操作方法,点击搜索。最后按照搜索到的初始化方法初始化即可。
请教卡尔曼滤波中,过程噪音和测量噪音的协方差矩阵如何求
1、观测噪声协方差矩阵R的影响:增大或减小R中的值,观察卡尔曼滤波估计结果的变化。一般来说,增大R会使得滤波器对观测值的信任程度降低,而减小R会使得滤波器对观测值的信任程度提高。
2、其中,K(k)表示卡尔曼增益,R(k)表示观测噪声协方差矩阵,x(k|k)表示时刻k的状态估计值。然后,计算状态估计误差的协方差矩阵:P(k|k) = (I - K(k) H) P(k|k-1)其中,I表示单位矩阵。
3、R和Q矩阵一般来说都是提前设定一个值,因为卡尔曼滤波是一种迭代优化滤波器,所以不必要使得初始化的值十分精确。当然,如果设定越接近真实值其结果越准确,算的速度也越快。
4、观测矩阵有专门的文章研究。对于简单的卡尔曼滤波,观测矩阵就是单位矩阵,也就是说可以直接观测到状态向量。也可能出现其他的线性观测矩阵,做法一样。
5、这是一阶差分方程租,x(k)=x(k-1)+dx(k-1);y(k)=y(k-1)+dy(k-1);dx(k)=dx(k-1);dy(k)=dy(k-1).表示系统状态方程的递推关系。
6、但对于卡尔曼滤波器的详细证明,这里不能一一描述。首先,我们先要引入一个离散控制过程的系统。
到此,以上就是小编对于噪声的协方差矩阵的问题就介绍到这了,希望介绍的几点解答对大家有用,有任何问题和不懂的,欢迎各位老师在评论区讨论,给我留言。
 微信扫一扫打赏
微信扫一扫打赏